Eliza - A computer programmed robot that answered questions with questions. It had 240 lines of code.
Unimate Robot - The first industrial robot built in 1961. It took die casting from machines and performed weilding similar to a human task.
Wednesday, July 21, 2010
What Is A Robot?
A robot is a machine that can be programmed or controlled to do a specific task such as walking or flying. This is usually powered by electricity and can resemble human tasks.
Thursday, June 3, 2010
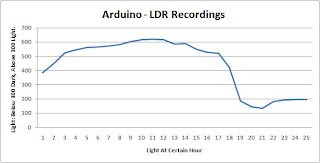
Task 59 - Data Logging of Light Over 24 Hours
I found this was not very accurate as EEPROM was not storing numbers correctly. If a number was over 300 it would not save it into EEPROM, but would save another number all together. However These are my results

#include
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading; // the analog reading from the analog resistor divider
int value;
int a = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <25; i++){
photocellReading = analogRead(photocellPin);
Serial.print("Analog reading = ");
Serial.println(photocellReading);
EEPROM.write(i, photocellReading);
delay(3600000);
value = EEPROM.read(i);
Serial.print(i);
Serial.print("\t");
Serial.print(value);
Serial.println();
}
for (int i=0; i <25; i++){
value = EEPROM.read(i);
Serial.print(i);
Serial.print("\t");
Serial.print(value);
Serial.println();
}
}
void loop(){
}
Graphed Results (Analog Results, not ones stored in EEPROM):


#include
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading; // the analog reading from the analog resistor divider
int value;
int a = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <25; i++){
photocellReading = analogRead(photocellPin);
Serial.print("Analog reading = ");
Serial.println(photocellReading);
EEPROM.write(i, photocellReading);
delay(3600000);
value = EEPROM.read(i);
Serial.print(i);
Serial.print("\t");
Serial.print(value);
Serial.println();
}
for (int i=0; i <25; i++){
value = EEPROM.read(i);
Serial.print(i);
Serial.print("\t");
Serial.print(value);
Serial.println();
}
}
void loop(){
}
Graphed Results (Analog Results, not ones stored in EEPROM):

Major Project - Pong Through One Matrix Display
/*This is a Pong game used on one Matrix display using analog
potentionmeters to move the paddles. This game was helped using
similar code from Tom Igoe (for pong) and scrolling message from
the website http://www.tinyurl.com/yhwxv6h*/
// define the edges of the screen:
#define LEFT 0
#define RIGHT 7
#define TOP 0
#define BOTTOM 7
int speed = 15; //number of times to repeat each frame
int pauseDelay = 500; //microseconds to leave each row on before moving to the next
int index = 0; //this is the current charachter in the string being displayed
int offset = 0; //this is how many columns it is offset by
const int A = 0; const int B = 1; const int C = 2; const int D = 3; const int E = 4;
const int F = 5; const int G = 6; const int H = 7; const int I = 8; const int J = 9;
const int K = 10; const int L =11; const int M = 12; const int N = 13; const int O = 14;
const int P = 15; const int Q =16; const int R = 17; const int S = 18; const int T = 19;
const int U = 20; const int V =21; const int W = 22; const int X = 23; const int Y = 24;
const int Z = 25; // Letters to be displayed
char requestString1[] = " Left Player Wins "; // Request String for left player
char requestString2[] = " Right Player Wins "; // Request String for right player
int matrixCount = 0;
int rowA[] ={11,14,16,3,13,5,7,9}; //5,6,7,8,9,10,11,12 of matrix
//An Array defining which pin each row is attached to
int colA[] = {8,6,4,2,17,15,12,10}; //24,23,22,21,4,3,2,1 of matrix
//An Array defining which pin each col is attached to
//Punctuation
const int COL =26; const int DASH = 27; const int BRA2 = 28; const int _ = 29; const int LINE = 34;
const int DOT =36;
//Extra Charchters
const int FULL =30; const int CHECK = 31; const int A3 = 32; const int TEMP = 33;
const int SMILE =35; const int COLDOT = 36;
//The array used to hold a bitmap of the display
//(if you wish to do something other than scrolling marque change the data in this
//variable then display)
byte data[] = {0,0,0,0,0,0,0,0};
//The alphabet
//Each Charachter is an 8 x 7 bitmap where 1 is on and 0 if off
const int _A[] = {B0001000,
B0010100,
B0100010,
B1000001,
B1111111,
B1000001,
B1000001,
B0000000};
const int _B[] = {B1111110,
B0100001,
B0100001,
B0111110,
B0100001,
B0100001,
B1111110,
B0000000};
const int _C[] = {B0011111,
B0100000,
B1000000,
B1000000,
B1000000,
B0100000,
B0011111,
B0000000};
const int _D[] = {B1111100,
B0100010,
B0100001,
B0100001,
B0100001,
B0100010,
B1111100,
B0000000};
const int _E[] = {B1111111,
B1000000,
B1000000,
B1111100,
B1000000,
B1000000,
B1111111,
B0000000};
const int _F[] = {B1111111,
B1000000,
B1000000,
B1111100,
B1000000,
B1000000,
B1000000,
B0000000};
const int _G[] = {B0011111,
B0100000,
B1000000,
B1001111,
B1000001,
B0100001,
B0011111,
B0000000};
const int _H[] = {B1000001,
B1000001,
B1000001,
B1111111,
B1000001,
B1000001,
B1000001,
B0000000};
const int _I[] = {B1111111,
B0001000,
B0001000,
B0001000,
B0001000,
B0001000,
B1111111,
B0000000};
const int _J[] = {B0001111,
B0000001,
B0000001,
B0000001,
B0000001,
B1000001,
B0111110,
B0000000};
const int _K[] = {B1000011,
B1000100,
B1001000,
B1110000,
B1001000,
B1000100,
B1000011,
B0000000};
const int _L[] = {B1000000,
B1000000,
B1000000,
B1000000,
B1000000,
B1000000,
B1111111,
B0000000};
const int _M[] = {B1110110,
B1001001,
B1001001,
B1001001,
B1001001,
B1001001,
B1001001,
B0000000};
const int _N[] = {B1000001,
B1100001,
B1010001,
B1001001,
B1000101,
B1000011,
B1000001,
B0000000};
const int _O[] = {B0011100,
B0100010,
B1000001,
B1001001,
B1000001,
B0100010,
B0011100,
B0000000};
const int _P[] = {B1111110,
B0100001,
B0100001,
B0111110,
B0100000,
B0100000,
B0100000,
B0000000};
const int _Q[] = {B0011100,
B0100010,
B1000001,
B1000001,
B1000101,
B0100010,
B0011101,
B0000000};
const int _R[] = {B1111110,
B0100001,
B0100001,
B0101110,
B0100100,
B0100010,
B0100001,
B0000000};
const int _S[] = {B0111111,
B1000000,
B1000000,
B0111110,
B0000001,
B0000001,
B1111110,
B0000000};
const int _T[] = {B1111111,
B0001000,
B0001000,
B0001000,
B0001000,
B0001000,
B0001000,
B0000000};
const int _U[] = {B1000001,
B1000001,
B1000001,
B1000001,
B1000001,
B1000001,
B0111110,
B0000000};
const int _V[] = {B1000001,
B1000001,
B1000001,
B1000001,
B0100010,
B0010100,
B0001000,
B0000000};
const int _W[] = {B1000001,
B1001001,
B1001001,
B1001001,
B1001001,
B1001001,
B0110110,
B0000000};
const int _X[] = {B1000001,
B0100010,
B0010100,
B0001000,
B0010100,
B0100010,
B1000001,
B0000000};
const int _Y[] = {B1000001,
B0100010,
B0010100,
B0001000,
B0001000,
B0001000,
B0001000,
B0000000};
const int _Z[] = {B1111111,
B0000010,
B0000100,
B0111110,
B0010000,
B0100000,
B1111111,
B0000000};
const int _COL[] = {B0000000,
B0011000,
B0011000,
B0000000,
B0011000,
B0011000,
B0000000,
B0000000};
const int _DASH[] = {B0000000,
B0000000,
B0000000,
B0111110,
B0000000,
B0000000,
B0000000,
B0000000};
const int _BRA2[] = {B0010000,
B0001000,
B0000100,
B0000100,
B0001000,
B0010000,
B0000000,
B0000000};
const int __[] = {B0000000,
B0000000,
B0000000,
B0000000,
B0000000,
B0000000,
B0000000,
B0000000};
const int _FULL[] = {B1111111,
B1111111,
B1111111,
B1111111,
B1111111,
B1111111,
B1111111,
B1111111};
const int _CHECK[] = {B1010101,
B0101010,
B1010101,
B0101010,
B1010101,
B0101010,
B1010101,
B0000000};
const int _A3[] = {B0111110,
B0000001,
B0000001,
B0001111,
B0000001,
B1000001,
B0111110,
B0000000};
const int _TEMP[] = {B0000011,
B0011111,
B0111111,
B1111110,
B1111111,
B0011111,
B0000011,
B0000000};
const int _LINE[] = {B0000001,
B0000001,
B0000001,
B0000001,
B0000001,
B0000001,
B0000001,
B0000000};
const int _SMILE[] = {B1100110,
B1100110,
B0000000,
B0011100,
B1000001,
B0100010,
B0011100,
B0000000};
const int _DOT[] = {B0000000,
B0000000,
B0000000,
B0000000,
B1100000,
B1100000,
B0000000,
B0000000};
const int _COLDOT[] = {B0000000,
B0110000,
B0110000,
B0000000,
B0110011,
B0110011,
B0000000,
B0000000};
//Load the bitmap charachters into an array (each charachters position corresponds to its previously defined index (ie _A (a's bitmap)
//is at index 0 and A = 0 so letters[A] will return the 'A' bitmap)
const int* letters[] = {_A,_B,_C,_D,_E,_F,_G,_H,_I,_J,_K,_L,_M,_N,_O,_P,_Q,_R,_S,_T,_U,_V,_W,_X,_Y,_Z,_COL,_DASH,_BRA2,__, _FULL, _CHECK, _A3, _TEMP, _LINE, _SMILE, _DOT, _COLDOT};
//Setup runs once when power is applied
int pixels[8][8]; // 2-dimensional array of pixels
// 2-dimensional array of row pin numbers (for two matrices):
int row[1][8] = {11,14,16,3,13,5,7,9}; //5,6,7,8,9,10,11,12 of matrix
// 2-dimensional array of column pin numbers (for two matrices):
int col[1][8] = {8,6,4,2,17,15,12,10}; //24,23,22,21,4,3,2,1 of matrix
int ballX = 3; // X position of the ball
int ballY = 4; // Y position of the ball
int ballDirectionY = 1; // X direction of the ball
int ballDirectionX = 1; // Y direction of the ball
int lCount = 0; // count score for left paddle
int rCount = 0; // count score for right paddle
int rightPaddleY = 0; // X position of the center of the right paddle
int leftPaddleY = 0; // Y position of the center of the right paddle
long timeStamp = 0; // time stamp to control the pauses between ball moves
long interval = 250; // interval between ball moves, in milliseconds
boolean gamePaused = false; // state of the game
void setup() {
// initialize the I/O pins as outputs:
// iterate over the matrix:
for (int thisMatrix = 0; thisMatrix < 1; thisMatrix++) {
// iterate over the pins:
for (int thisPin = 0; thisPin < 8; thisPin++) {
// initialize the output pins:
pinMode(col[thisMatrix][thisPin], OUTPUT);
pinMode(row[thisMatrix][thisPin], OUTPUT);
// take the col pins (i.e. the cathodes) high to ensure that
// the LEDS are off:
digitalWrite(col[thisMatrix][thisPin], HIGH);
}
}
newGame();
}
void loop() {
// read input:
readSensors();
// move the ball:
if (gamePaused) {
if (millis() - timeStamp > interval*10) {
// if enough time has passed, start the game again:
gamePaused = false;
}
}
// if the game isn't paused, and enough time between ball moves
// has passed, move the ball and update the timestamp:
else {
if (millis() - timeStamp > interval) {
moveBall();
timeStamp = millis();
}
}
// draw the screen:
refreshScreen();
}
void newGame() {
for (int thisMatrix = 0; thisMatrix < 1; thisMatrix++) {
// iterate over the pins:
for (int thisPin = 0; thisPin < 8; thisPin++) {
digitalWrite(row[thisMatrix][thisPin], HIGH);
digitalWrite(col[thisMatrix][thisPin], LOW);
}
delay(200);
for (int thisPin = 0; thisPin < 8; thisPin++) {
digitalWrite(row[thisMatrix][thisPin], LOW);
digitalWrite(col[thisMatrix][thisPin], LOW);
}
delay(100);
}
}
void readSensors() {
// set the left paddle to off:
setPaddle(LEFT, leftPaddleY, HIGH);
// set the right paddle to off:
setPaddle(RIGHT, rightPaddleY, HIGH);
// read the sensors for X and Y values:
leftPaddleY = map(analogRead(4), 0, 1023, 0, 7);
rightPaddleY = map(analogRead(5), 0, 1023, 0, 7);
// set the left paddle to on:
setPaddle(LEFT, leftPaddleY, LOW);
// set the right paddle to on:
setPaddle(RIGHT, rightPaddleY, LOW);
}
void setPaddle(int paddleX, int paddleY, int state) {
// set the last right paddle to on:
pixels[paddleX][paddleY] = state;
// set the bottom pixel of the paddle:
if (paddleY < BOTTOM) {
pixels[paddleX][paddleY+1] = state;
}
// set the top pixel of the paddle:
if (paddleY > TOP) {
pixels[paddleX][paddleY-1] = state;
}
}
void moveBall() {
// check to see if the ball is in the horizontal range
// of the paddles:
// right:
if (ballX >= RIGHT - 1) {
// if the ball's next Y position is between
// the top and bottom of the paddle, reverse its X direction:
if ((ballY + ballDirectionY >= rightPaddleY - 1)
&& (ballY + ballDirectionY <= rightPaddleY +1)) {
// reverse the ball horizontal direction:
ballDirectionX = -ballDirectionX;
}
}
// left:
if (ballX <= LEFT + 1) {
// if the ball's next Y position is between
// the top and bottom of the paddle, reverse its X direction:
if ((ballY + ballDirectionY >= leftPaddleY -1 )
&& (ballY + ballDirectionY <= leftPaddleY +1 )) {
// reverse the ball horizontal direction:
ballDirectionX = -ballDirectionX;
}
}
// if the ball goes off the screen bottom,
// reverse its Y direction:
if (ballY == BOTTOM) {
ballDirectionY = -ballDirectionY;
}
// if the ball goes off the screen top,
// reverse its X direction:
if (ballY == TOP) {
ballDirectionY = -ballDirectionY;
}
// clear the ball's previous position:
pixels[ballX][ballY] = HIGH;
// if the ball goes off the screen left or right:
if ((ballX == LEFT) || (ballX == RIGHT)) {
if (ballX == LEFT) {
lCount = lCount+1;
if (lCount == 3){
matrixCount = 1;
for (int i=0; i<136; i++){
updateMatrix();
}
lCount = 0;
rCount = 0;
newGame();
}
}else if (ballX==RIGHT){
rCount = rCount+1;
if (rCount == 3){
matrixCount = 2;
for (int i=0; i<144; i++){
updateMatrix();
}
lCount = 0;
rCount = 0;
newGame();
}
}
// reset the ball:
ballX = 4;
ballY = 4;
// pause and note the time you paused:
gamePaused = true;
timeStamp = millis();
}
// increment the ball's position in both directions:
ballX = ballX + ballDirectionX;
ballY = ballY + ballDirectionY;
// if the game isn't paused, set the ball
// in its new position:
if (!gamePaused) {
// set the new position:
pixels[ballX][ballY] = LOW;
}
}
void refreshScreen() {
// iterate over the matrices:
for (int thisMatrix = 0; thisMatrix < 1; thisMatrix++) {
// iterate over the rows (anodes):
for (int thisRow = 0; thisRow < 8; thisRow++) {
// take the row pin (anode) high:
digitalWrite(row[thisMatrix][thisRow], HIGH);
// iterate over the cols (cathodes):
for (int thisCol = 0; thisCol < 8; thisCol++) {
// get the state of the current pixel;
int thisPixel = pixels[thisRow+ (thisMatrix * 8)][thisCol];
// when the row is HIGH and the col is LOW,
// the LED where they meet turns on:
digitalWrite(col[thisMatrix][thisCol], thisPixel);
// turn the pixel off:
digitalWrite(col[thisMatrix][thisCol], HIGH);
}
// take the row pin low to turn off the whole row:
digitalWrite(row[thisMatrix][thisRow], LOW);
}
}
}
void updateMatrix(){
loadSprite();
showSprite(speed);
}
const int powers[] = {1,2,4,8,16,32,64,128};
//Loads the current scroll state frame into the data[] display array
void loadSprite(){
if (matrixCount == 1){
int currentChar = getChar(requestString1[index]);
int nextChar = getChar(requestString1[index+1]);
for(int row=0; row < 8; row++){ //iterate through each row
data[row] = 0; //reset the row we're working on
for(int column=0; column < 8; column++){ //iterate through each column
data[row] = data[row] + ((powers[column] & (letters[currentChar][row] << offset))); //loads the current charachter offset by offset pixels
data[row] = data[row] + (powers[column] & (letters[nextChar][row] >> (8-offset) )); //loads the next charachter offset by offset pixels
}
}
offset++; //increment the offset by one row
if(offset==8){offset = 0; index++; if(index==sizeof(requestString1)-2){index=0;}} //if offset is 8 load the next charachter pair for the next time through
}else if (matrixCount == 2){
int currentChar = getChar(requestString2[index]);
int nextChar = getChar(requestString2[index+1]);
for(int row=0; row < 8; row++){ //iterate through each row
data[row] = 0; //reset the row we're working on
for(int column=0; column < 8; column++){ //iterate through each column
data[row] = data[row] + ((powers[column] & (letters[currentChar][row] << offset))); //loads the current charachter offset by offset pixels
data[row] = data[row] + (powers[column] & (letters[nextChar][row] >> (8-offset) )); //loads the next charachter offset by offset pixels
}
}
offset++; //increment the offset by one row
if(offset==8){offset = 0; index++; if(index==sizeof(requestString2)-2){index=0;}} //if offset is 8 load the next charachter pair for the next time through
}
}
void showSprite(int speed2){
for(int iii = 0; iii < speed2; iii++){ //show the current frame speed2 times
for(int column = 0; column < 8; column++){ //iterate through each column
for(int i = 0; i < 8; i++){
digitalWrite(rowA[i], LOW); //turn off all row pins
}
for(int i = 0; i < 8; i++){ //Set only the one pin
if(i == column){ digitalWrite(colA[i], LOW);} //turns the current row on
else{ digitalWrite(colA[i], HIGH); }//turns the rest of the rows off
}
for(int row = 0; row < 8; row++){ //iterate through each pixel in the current column
int bit = (data[column] >> row) & 1;
if(bit == 1){
digitalWrite(rowA[row], HIGH); //if the bit in the data array is set turn the LED on
}
}
delayMicroseconds(pauseDelay); //leave the column on for pauseDelay microseconds (too high a delay causes flicker)
}
}
}
//returns the index of a given charachter
//for converting from a string to a lookup in our array of charachter bitmaps
int getChar(char charachter){
int returnValue = Z;
switch(charachter){
case 'A': returnValue = A; break;
case 'a': returnValue = A; break;
case 'B': returnValue = B; break;
case 'b': returnValue = B; break;
case 'C': returnValue = C; break;
case 'c': returnValue = C; break;
case 'D': returnValue = D; break;
case 'd': returnValue = D; break;
case 'E': returnValue = E; break;
case 'e': returnValue = E; break;
case 'F': returnValue = F; break;
case 'f': returnValue = F; break;
case 'G': returnValue = G; break;
case 'g': returnValue = G; break;
case 'H': returnValue = H; break;
case 'h': returnValue = H; break;
case 'I': returnValue = I; break;
case 'i': returnValue = I; break;
case 'J': returnValue = J; break;
case 'j': returnValue = J; break;
case 'K': returnValue = K; break;
case 'k': returnValue = K; break;
case 'L': returnValue = L; break;
case 'l': returnValue = L; break;
case 'M': returnValue = M; break;
case 'm': returnValue = M; break;
case 'N': returnValue = N; break;
case 'n': returnValue = N; break;
case 'O': returnValue = O; break;
case 'o': returnValue = O; break;
case 'P': returnValue = P; break;
case 'p': returnValue = P; break;
case 'Q': returnValue = Q; break;
case 'q': returnValue = Q; break;
case 'R': returnValue = R; break;
case 'r': returnValue = R; break;
case 'S': returnValue = S; break;
case 's': returnValue = S; break;
case 'T': returnValue = T; break;
case 't': returnValue = T; break;
case 'U': returnValue = U; break;
case 'u': returnValue = U; break;
case 'V': returnValue = V; break;
case 'v': returnValue = V; break;
case 'W': returnValue = W; break;
case 'w': returnValue = W; break;
case 'X': returnValue = X; break;
case 'x': returnValue = X; break;
case 'Y': returnValue = Y; break;
case 'y': returnValue = Y; break;
case 'Z': returnValue = Z; break;
case 'z': returnValue = Z; break;
case ' ': returnValue = _; break;
case '3': returnValue = A3; break;
case '<': returnValue = TEMP; break;
case '*': returnValue = FULL; break;
case '|': returnValue = LINE; break;
case '_': returnValue = _; break;
case ':': returnValue = COL; break;
case '-': returnValue = DASH; break;
case ')': returnValue = BRA2; break;
case '%': returnValue = SMILE; break;
case '.': returnValue = DOT; break;
case '^': returnValue = COLDOT; break;
}
return returnValue;
}
Sunday, May 30, 2010
Task 58 - Finding Average & Biggest Number With Suitable Message
#include EEPROM.h
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider
int value;
int a = 0;
int smallest = 0;
int biggest = 0;
float average = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
if (photocellReading < smallest){
smallest = photocellReading;
}
if (photocellReading > biggest){
biggest = photocellReading;
}
average = average + photocellReading;
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
Serial.println("The Smallest Value Was: " + smallest); // displays smallest value
Serial.println("The Biggest Value Was: " + biggest); // displays biggest value
average = average/10; // calculates mean
Serial.println("The Average/Mean Was: " + average); // displays average value
}
void loop(){
}
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider
int value;
int a = 0;
int smallest = 0;
int biggest = 0;
float average = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
if (photocellReading < smallest){
smallest = photocellReading;
}
if (photocellReading > biggest){
biggest = photocellReading;
}
average = average + photocellReading;
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
Serial.println("The Smallest Value Was: " + smallest); // displays smallest value
Serial.println("The Biggest Value Was: " + biggest); // displays biggest value
average = average/10; // calculates mean
Serial.println("The Average/Mean Was: " + average); // displays average value
}
void loop(){
}
Task 57 - Finding smallest Value With Suitable Message.
#include EEPROM.h
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider
int value;
int a = 0;
int smallest = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
if (photocellReading < smallest){
smallest = photocellReading;
}
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
Serial.println("The Smallest Value Was: " + smallest);
}
void loop(){
}
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider
int value;
int a = 0;
int smallest = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
if (photocellReading < smallest){
smallest = photocellReading;
}
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
Serial.println("The Smallest Value Was: " + smallest);
}
void loop(){
}
Sunday, May 16, 2010
Task 56 - Data Logging to EEPROM
#include EEPROM.h
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider];
//int mySamples[10];
int value;
int a = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
//mySamples[i] = (photocellReading);
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
}
void loop(){
}
int photocellPin = 0; // the cell and 10K pulldown are connected to a0
int photocellReading;// the analog reading from the analog resistor divider];
//int mySamples[10];
int value;
int a = 0;
void setup() {
Serial.begin(9600);
for (int i=0; i <10; i++){
photocellReading = analogRead(photocellPin);
//mySamples[i] = (photocellReading);
EEPROM.write(i, photocellReading);
delay(500);
}
for (int i=0; i <10; i++){
value = EEPROM.read(a);
Serial.print(a);
Serial.print("\t");
Serial.print(value);
Serial.println();
a = a + 1;
if (a == 10){
a = 0;
delay(500);
}
}
}
void loop(){
}
Subscribe to:
Posts (Atom)